Belajar bukan hanya seputar mengenai pelajaran yang didapat di sekolah/kuliah tetapi belajar bisa juga didapat di luar, dan belajar saja tidak akan cukup jika tidak diselingi dengan adanya praktik. Pada hari Rabu, tanggal 18 Januari 2023, Teknik Elektro UBAYA kembali mendapatkan kunjungan dari SMK Kr. Harapan Sejati. Para siswa dan siswi SMK KHS yang berkunjung adalah murid kelas 10 yang ditemani oleh beberapa guru. Para siswa-siswi terlihat sangat bersemangat karena kali ini alat-alat dan proyek dari mahasiswa Teknik Elektro UBAYA yang akan didemonstrasikan loh readers…. Salah satunya yaitu proyek mahasiswa Elektro UBAYA yaitu Mobil Listrik TEUSAV. Apa itu TEUSAV? Penasaran? yuk simak terus guys.
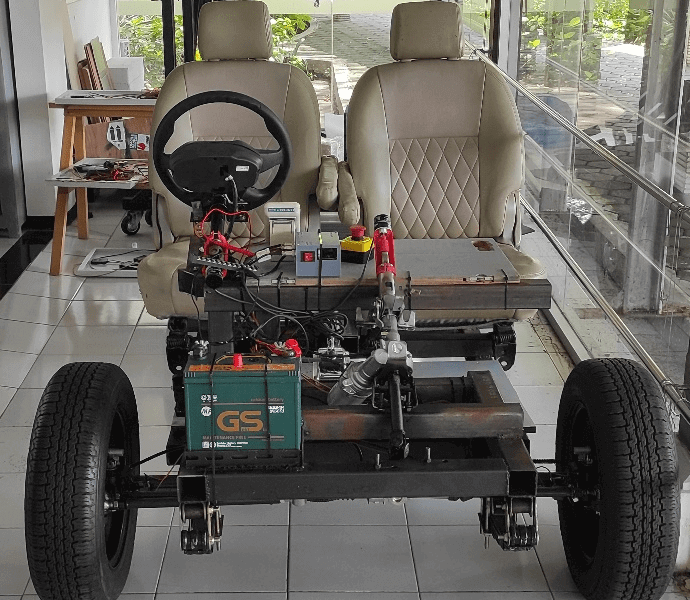
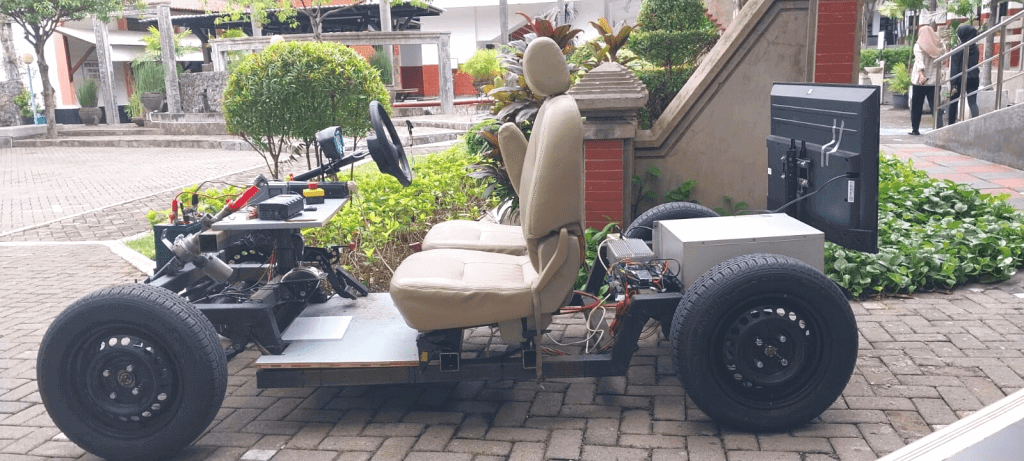
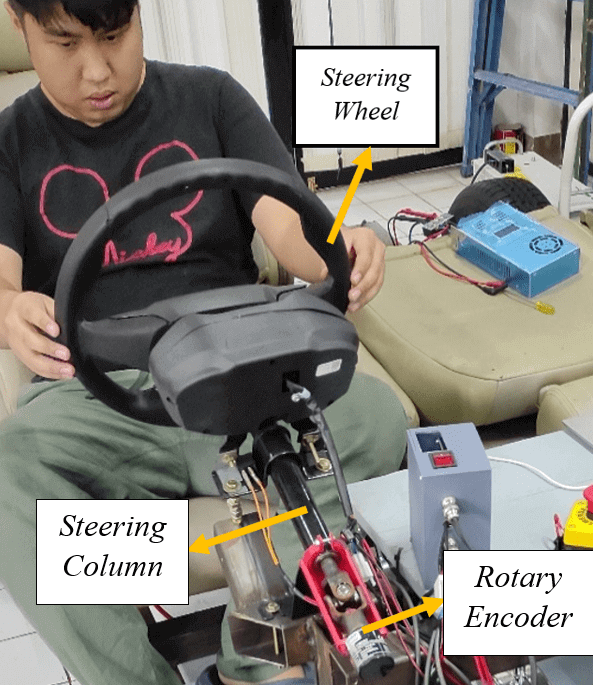
TEUSAV (Teknik Elektro UBAYA Smart Autonomous Vehicle) adalah mobil listrik pertama yang dikembangan oleh Teknik Elektro UBAYA. TEUSAV ini sendiri merupakan proyek karya mahasiswa dengan dibimbing oleh dosen Teknik Elektro UBAYA loh readers…… Mobil Listrik TEUSAV ini, sudah beberapa kali dicoba dikemudikan oleh mahasiswa Teknik Elektro dan bahkan sudah pernah dicoba oleh Ibu Christina Avanti, Ph.D., selaku Wakil Rektor 3 Universitas Surabaya. Mobil Listrik TEUSAV ini ada beberapa fitur-fitur keren yang tersedia loh, seperti Drive by Wire yang dikerjakan oleh Adrian Sugiarjo angkatan 2019 merupakan fitur pertama yang dikembangkan pada TEUSAV dan disebut sebagai fitur versi pertama v1.0. Cara kerja dari Drive by Wire (TEUSAV v1.0) ini menggunakan sistem kemudi mobil yang dilengkapi dengan tuas kemudi yang terhubung pada steer, bila steering wheel (roda kemudi) diputar, steering column (batang kemudi) akan meneruskan tenaga putar nya ke steering gear (roda gigi kemudi). Steering gear memperbesar tenaga putar ini sehingga dihasilkan momen putar yang lebih besar untuk diteruskan ke steering linkage. Lalu, steering linkage akan meneruskan gerakan steering gear ke roda depan.
Sistem kemudi TEUSAV menggunakan komponen mekanik dan elektronik yang berfungsi untuk menggerakan sistem kemudi ke kiri atau ke kanan dengan menggunakan input dari steering wheel (Pengemudi) dan output menggunakan motor DC yang dilengkapi sensor rotary encoder. Cara sensor rotary encoder bisa membaca perputaran adalah dengan menggunakan sensor optik yang dapat menghasilkan serial pulse. Serial pulse tersebut diterjemahkan menjadi informasi angle dan arah. Rotary encoder yang terpasang pada steering wheel akan berguna untuk mengambil input dari pengemudi, sedangkan rotary encoder yang terpasang di EPS (Electric Power Steering) input shaft berguna untuk mengambil feedback dari pergerakan motor DC yang terhubung ke EPS gearbox. Motor EPS yang akan menggerakan ban mendapatkan sinyal tegangan tertentu dari ECU (Electronic Control Unit). Untuk pengontrolan berapa sinyal tegangan yang harus dikeluarkan oleh ECU (Electronic Control Unit) ini sendiri dapat diketahui dengan melihat input steer. Sistem kontrol yang didesain dan diimplementasikan adalah Fuzzy Logic Controller (FLC) dan PID control.
Pergerakan pada sistem kemudi dikendalikan semua secara elektronik menggunakan motor DC yang terhubung ke driver motor mendapat input tegangan PWM dari ESP32 sehingga motor bergerak, ESP32 mendapat nilai PWM dari hasil sistem kontrol yang diproses dari sensor rotary encoder yang terhubung ke steering wheel. Rangkaian Homing memiliki 2 limit switch yang dipasang pada shaft roda depan yang berguna untuk mendeteksi batas belok mobil. Kegunaan utama dari homing adalah untuk mengkalibrasi arah mobil setiap SCU dinyalakan. SCU (Steering Control Unit) merupakan seperangkat alat yang bekerja sebagai sebuah sistem yang mengontrol steering pada kendaraan. Cara kerja dari homing yaitu pertama-tama rack and pinion digerakan ke arah kanan oleh SCU sampai limit switch mendapat input ON, kemudian SCU memberi perintah untuk berbelok ke arah sebaliknya sampai sensor rotary encoder mencapai angle lurus.

Selain fitur Drive by Wire (TEUSAV v1.0) ada berbagai fitur lain yang sedang dalam tahap pengerjaan yaitu, Auto Cruise Control and Electricity Diagnostic (TEUSAV v1.0), Fast Charging Control (TEUSAV v2.0), Regenerative Braking (TEUSAV v2.0), Adaptive Cruise Control (TEUSAV v3.0.), LiDAR SLAM for Autonomous Driving Vehicles (TEUSAV v3.0.), Lane Keeping Assist System (TEUSAV v3.0). Gimana nih guys menurut kalian mengenai Mobil Listrik TEUSAV? Keren kan pastinya, jika kalian mendapatkan pengerjaan proyek lain kira-kira readers mau bikin apa ya? Atau mau menyarankan ide untuk teman-teman mahasiswa? Boleh banget, kalian dapat menghubungi Contact Person yang tersedia… come on and talk with us, see you guys!!